| 略語 | 用語 | 意味 |
|---|---|---|
| No | 日付 | 版数 | 変更種別 | 変更内容 |
|---|---|---|---|---|
| 1 | 2026/01/02 | 0.1 | 新規 | 新規作成 |
| 2 | 2026/01/27 | 0.2 | 変更・追加 | 箱庭コア機能のインストール手順追加 |
1. 本ドキュメントについて¶
Ubuntu 24.04上で、箱庭ドローンシミュレータを動作させるためのインストール手順になります。
‐ 利用する環境一覧
| 利用環境名 | 説明 | 備考 |
|---|---|---|
| OS | Ubuntu 24.04 | LTSのものを選択。インストール手順は割愛 |
| Python | 3.12 | Pyenvの仮想環境を利用 |
| ビルド環境 | Ubuntu 24.04で利用できるコンパイラなど | 事前にインストール必要 |
本ドキュメントでは、githubからのクーロンやUbuntuのコマンド操作部分などで、コピー&ペーストが必要な部分には、$等は含みません
2. 箱庭ドローンシミュレータ用のリポジトリの説明¶
Ubuntu 24.04で利用する箱庭ドローンシミュレータ用のリポジトリは3つになります。
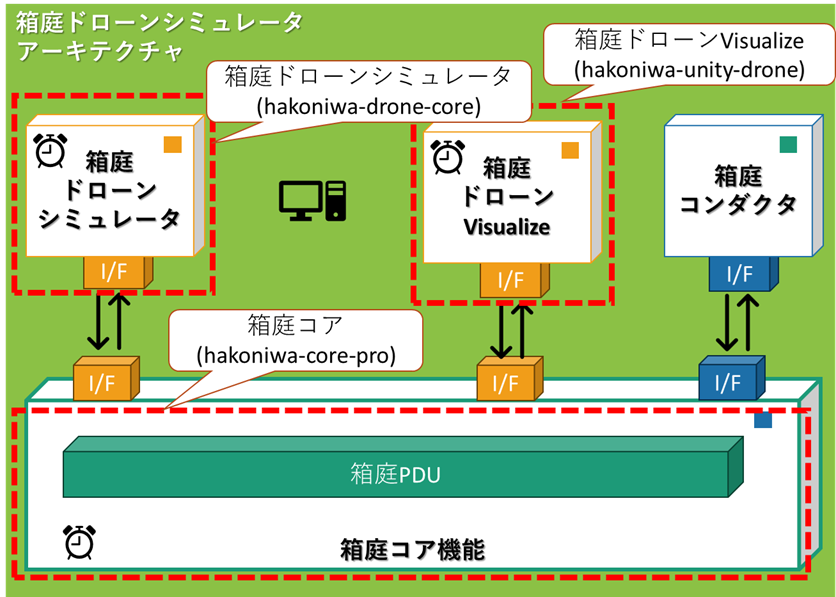
- 箱庭ドローンシミュレータ用のリポジトリ説明
| リポジトリ名 | 説明 | リンク |
|---|---|---|
| 箱庭コア | 箱庭アセットなど箱庭の機能を統合してリアルタイムOSのように各機能の「指揮者」の役割をする機能 | hakoniwa-core-pro |
| 箱庭ドローンシミュレータ | ドローン飛行の制御を担う機能 | hakoniwa-drone-core |
| 箱庭ドローンVisualize | 箱庭ドローンシミュレータでのドローン飛行などをビジュアライズする機能 | hakoniwa-unity-drone |
各機能をgithubからクーロンして利用します。本ドキュメントでは、箱庭ドローンシミュレータは、OSS版を利用します。箱庭ドローンVisualizeは、Unity版を利用します。
3. 箱庭ドローンシミュレータの利用¶
本ドキュメントは、箱庭ドローンシミュレータのリポジトリを対象にしたものになります。作業用のディレクトリとして、hakoniwaディレクトリ作成した解説となります。
$ cd
$ mkdir hakoniwa
3.1. 箱庭ドローンシミュレータのインストール¶
githubからクーロンを行います。
$ cd
$ cd hakoniwa
git clone --recursive https://github.com/toppers/hakoniwa-drone-core.git
クーロンができたら、箱庭ドローンシミュレータのインストールを実行します。
bash install-drone-ubuntu.bash
インストール用のスクリプトを実行すると、以下のようにsudoコマンドのパスワードを聞かれますので、パスワードを入力して実行してください。パスワード入力がなければ、以下の部分は無視してください。
[ 1/1 ] Preflight checks (apt environment & build deps)
[sudo] password for buildman:
最後に以下のメッセージが出力されたらインストール完了です。
:
中略
:
All done! Current Python: Python 3.12.3
Tip: open a new shell so your /home/buildman/.bashrc changes take effect there too.
インストールされると、.bashrcが更新されますので、再読み込みするか、シェル画面を再起動してください。
3.1.1. 箱庭コア機能(ドローン飛行に特化した機能)¶
install-drone-ubuntu.bashで箱庭ドローンシミュレータが利用するドローンの飛行に必要な最低限の箱庭コア機能は、debパッケージとしてインストールされます。拡張として、ドローン飛行以外の機能を利用する場合は、別途、箱庭コア機能のインストールが必要になります。
3.1.2. 箱庭Pythoモジュール¶
Python APIや、箱庭PDUをモニタリングする場合など、ドローンの飛行以外に箱庭ドローンシミュレータの拡張機能を利用する場合には、箱庭コア機能のインストールが必要になります。箱庭コアのインストールを参照してください。
3.1.2.1. python site-packageの導入¶
以下のPythonモジュールをインストールしてください。
$ pip install pygame
$ pip install numpy
$ pip install opencv-python
3.2. mujocoのインストール¶
箱庭ドローンシミュレータでは、物理的なシミュレーション部分をMuJoCoといわれるライブラリを使って対応しています。 箱庭ドローンシミュレータを利用するためには、MuJoCoをインストールする必要があります。手順は、以下になります。
3.3. 箱庭コア機能のインストール¶
ドローンの飛行以外の機能を利用する場合には、箱庭コア機能のインストールが必要になります。 インストール手順は、以下を参照してください。
4. トラブルシュート¶
箱庭ドローンシミュレータの利用時にトラブルとなる部分を列挙しておきます。 随時更新予定ですので、現時点で分かっているものだけを記載しています。
4.1. mmapの権限¶
/var/lib/hakoniwa/mmap/に箱庭ドローンシミュレータが利用するmmap(共有メモリ)が作成されます。権限の問題で、以下のようなERRORが発生する場合があります。
ERROR: can not create mmap file:/var/lib/hakoniwa/mmap/mmap-0xff.bin
ERROR: hako_mmap_create() id=255 size=1129608 error=13
ASSERTION FAILED:./hakoniwa-core-cpp/src/hako/data/hako_master_data.hpp:init:58:shmid >= 0ERROR: can not create flock file:/var/lib/hakoniwa/mmap/flock.bin
Segmentation fault (core dumped)
この場合には、以下のように権限を変更することでERRORを回避することができます。
sudo chmod 755 /var/lib/hakoniwa
sudo chmod 777 /var/lib/hakoniwa/mmap/