箱庭ドローンシミュレータ 準備編
Windows環境の利用での事前準備の説明
目次
用語集・改版履歴
| 略語 | 用語 | 意味 |
|---|---|---|
| No | 日付 | 版数 | 変更種別 | 変更内容 |
|---|---|---|---|---|
| 1 | 2025/09/22 | 0.1 | 新規 | 新規作成 |
1. 本ドキュメントについて¶
本ドキュメントは、箱庭ドローンシミュレータが利用する外部ソフトウェア環境を事前にインストールする手順となります。本ドキュメントで解説している部分は、事前にセットアップ済やインストール済みであれば読み飛ばして頂いて問題ありません。また、最初に一度やれば良い手順ですので、一度実施済みであれば、本ドキュメントを読み飛ばして、問題ありません。
1.1. 対象環境¶
本ドキュメントでは、以下のOSバージョンとPC環境を推奨としています。
| No | 対象 | 内容 |
|---|---|---|
| 1 | OS | Windows10 or Windows11 |
| 2 | PC | 64bit環境 |
| 3 | PC | Hyper-vが利用できること(推奨) |
| 4 | PC | Corei7 9th以降 |
| 5 | PC | 32Gbyteのメモリ推奨 |
| 6 | PC | SSD 512Gbyte以上 |
| 7 | PC | Graphicsアクセラレータ推奨 |
1.2. 箱庭ドローンシミュレータ¶
箱庭ドローンシミュレータは、合同会社 箱庭ラボで開発、運営されているPC上で動作するドローン用のシミュレーションになります。 「箱の中に、さまざまなモノをみんなの好みで配置して、いろいろ試せる!」をコンセプトとして、さまざまな機器やサービスを連携させることでPC上での実証実験に利用できる環境となっています。
1.3. Windows上での箱庭ドローンシミュレータ必要な環境¶
Windows環境で、箱庭ドローンシミュレータを利用するにあたっては、以下のドローンシミュレーションに必要なソフトウェア環境をインストールが必要になります。
箱庭自体がシミュレータではなく、シミレーションに必要となる各ソフトウェア環境と連携してドローン操縦や操作を実現するような構成になっています。
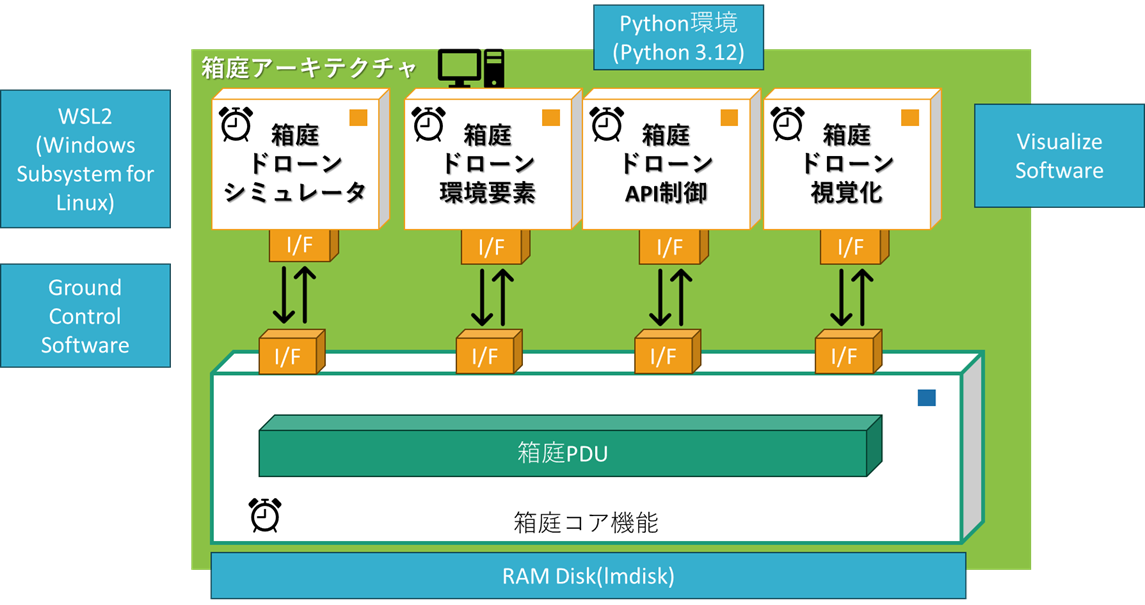
表.各ソフトウェア環境の説明(上図の青箱部分)
| No | ソフトウェア環境 | 概要 |
|---|---|---|
| 1 | WSL2(Windows Subsystem for Linux) | ドローン飛行に必要なフライトコントローラのソフトウェアを動作させる環境として利用します。フライトコントローラはPX4、Ardupilotが利用できます。 |
| 2 | Python環境 | 箱庭シミュレータでPythonでの制御に必要になります。対応バージョンは、3.12のみです。 |
| 3 | RAM Disk環境(lmdisk) | アセット間で通信する際に共有メモリとして利用します |
| 4-1 | Ground Control software:QGC | QGC編:フライトコントローラ(WSL2上で動作)と連携し、ドローン飛行の制御やドローンフライトプランなどに利用します |
| 4-2 | Ground Control software:Mission Planner | (準備中!!)Mission Planner編フライトコントローラ(WSL2上で動作)と連携し、ドローン飛行の制御やドローンフライトプランなどに利用します |
| 5 | Visualze Software:Unity | Unity編:ドローンの機体モデルや飛行状況を投影するのに利用します(利用にあたってはライセン条項を確認してください。) |
| 5 | Visualze Software:Unreal Engine | (準備中!!)Unreal Engine編:ドローンの機体モデルや飛行状況を投影するのに利用します(利用にあたってはライセン条項を確認してください。) |