| 略語 | 用語 | 意味 |
|---|---|---|
| No | 日付 | 版数 | 変更種別 | 変更内容 |
|---|---|---|---|---|
| 1 | 2026/01/05 | 0.1 | 新規 | 新規作成 |
1. 本ドキュメントについて¶
本ドキュメントは、箱庭ドローンシミュレータとOSSのフライトコントローラ PX4を連動させて、シミュレーションの操作をする方法を解説しています。
対象のPlatformは、Ubuntu 24.04 LTSを想定しています。他のPlatformは対象外となります。
2. 各種インストールについて¶
以下のリンクを見て対応を行ってください。
2.1. 必要なスクリプト類¶
以下のスクリプト類をダウンロードしてください。
2.2. ビジュアライズ環境¶
PX4と連携したドローン飛行のビジュアライズする環境になります。
3. 箱庭ドローンシミュレータ+PX4の動作方法¶
箱庭ドローンシミュレータを使って、PX4と連動させる方法となります。
作業ディレクトリは、hakoniwaを想定しています。
$ cd
$ mkdir hakoniwa
3.1. 事前準備¶
PX4環境、ドローンビジュアライズ環境、各種スクリプトの導入を行います。
3.1.1. PX4のビルド¶
PX4をUbuntu 24.04環境で動作させるためにビルドして、起動させます。PX4をビルドするための作業ディレクトリを作成します。
$ cd
$ cd hakoniwa
$ mkdir px4
$ cd px4
px4sim.zipを解凍します。
$ unzip ~/Downlods/px4sim.zip
$ ls
hakoniwa-apps sim
PX4のgithubから、PX4本体をクーロンして、ビルドします。ビルド手順は以下を参照してください。ディレクトリ構成などは読み替えて対応をしてください。
3.1.2. ドローンビジュアライズ環境の導入¶
箱庭ドローンシミュレータ環境にドローンビジュアライズ環境の導入します。
$ cd ~/hakoniwa/hakoniwa-drone-core
$ mv WebAvatar WebAvatar.old
$ unzip ~/Downloads/WevAvatar.zip
$ unzip ~/Downloads/LiDARAvatar.zip
3.1.3. スクリプトの導入¶
PX4を操作するスクリプト、LiDARのデータを可視化するスクリプトを導入します。
$ cd ~/hakoniwa
$ unzip ~/Downloads/drone_api_px4.zip
$ unzip ~/Downloads/lidar_visual.zip
3.2. 動作確認¶
動作確認には、シェル画面が4つ必要になります。事前にシェル画面を4つ立ち上げておいてください。
3.2.1. PX4の起動¶
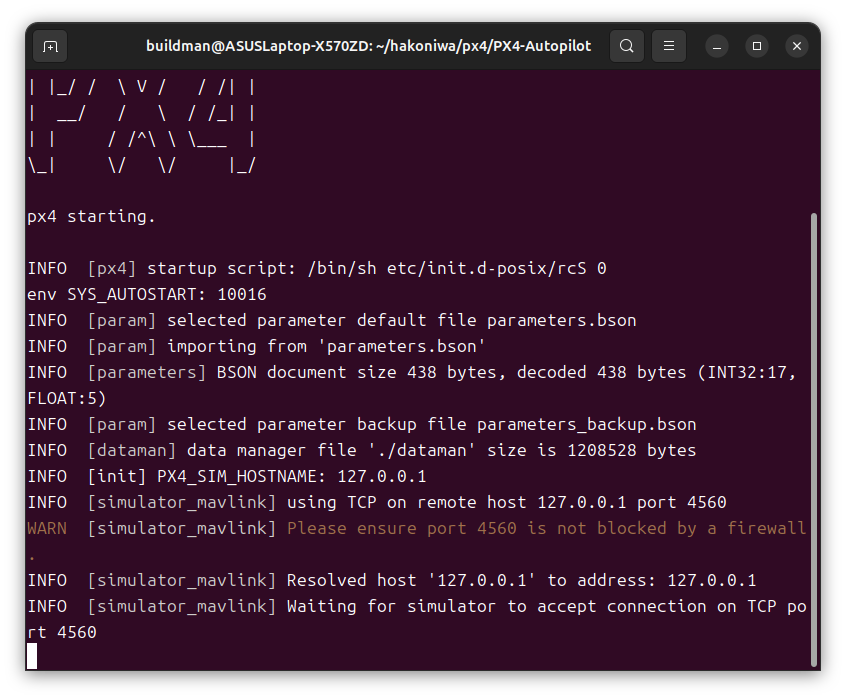
1つの目のシェル画面でPX4を起動します。
$ cd ~/hakoniwa/px4/PX4-Autopilot
$ bash ../sim/simstart.bash
起動すると以下のようなシェル画面になります。
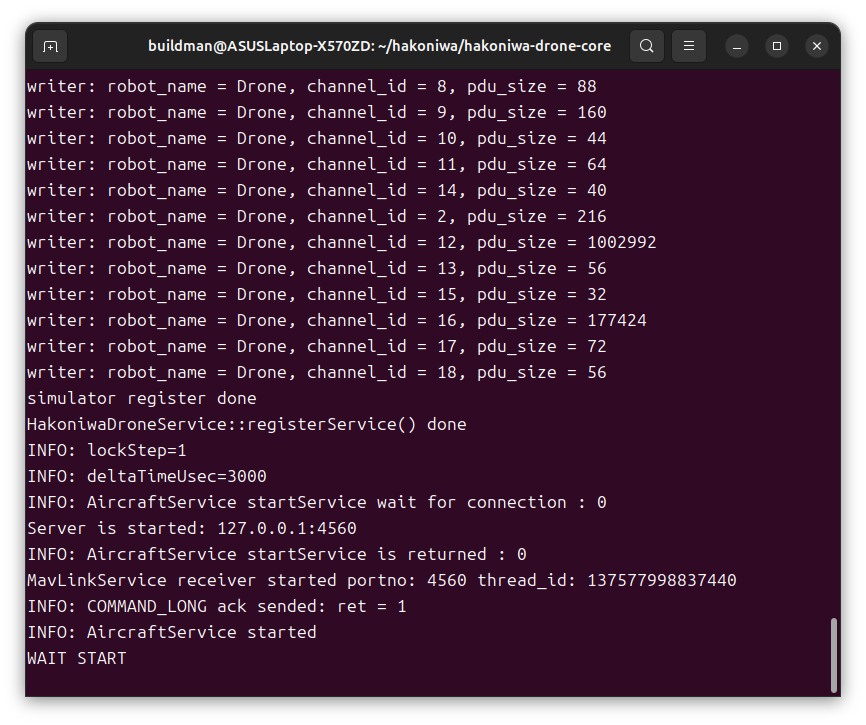
3.2.2. 箱庭ドローンシミュレータの起動¶
PX4と連動させるため箱庭ドローンシミュレータの起動を行います。
$ cd ~/hakoniwa/hakoniwa-drone-core
./lnx/linux-main_hako_aircraft_service_px4 127.0.0.1 4560 ./config/drone/px4-1 ./WebAvatar/webavatar.json
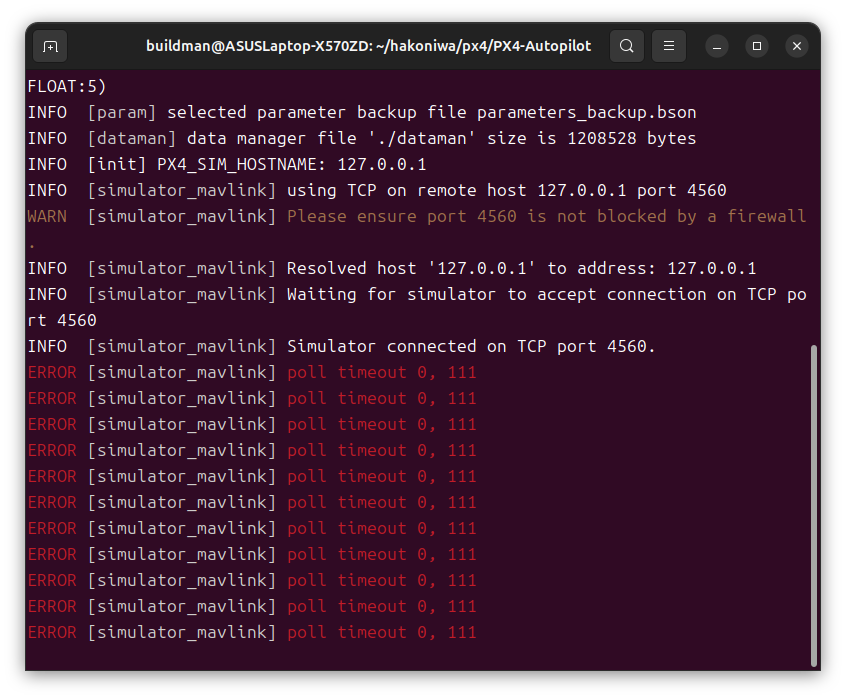
起動すると以下のシェル画面になります。
このときにPX4のシェル画面にERRORが表示されますが問題ありません。
3.2.3. 箱庭ドローンシミュレータビジュアライズ環境の起動¶
ビジュアライズ環境を起動します。
$ ~/hakoniwa/hakoniwa-drone-core/WebAvatar
$ ./simulation.x86_64
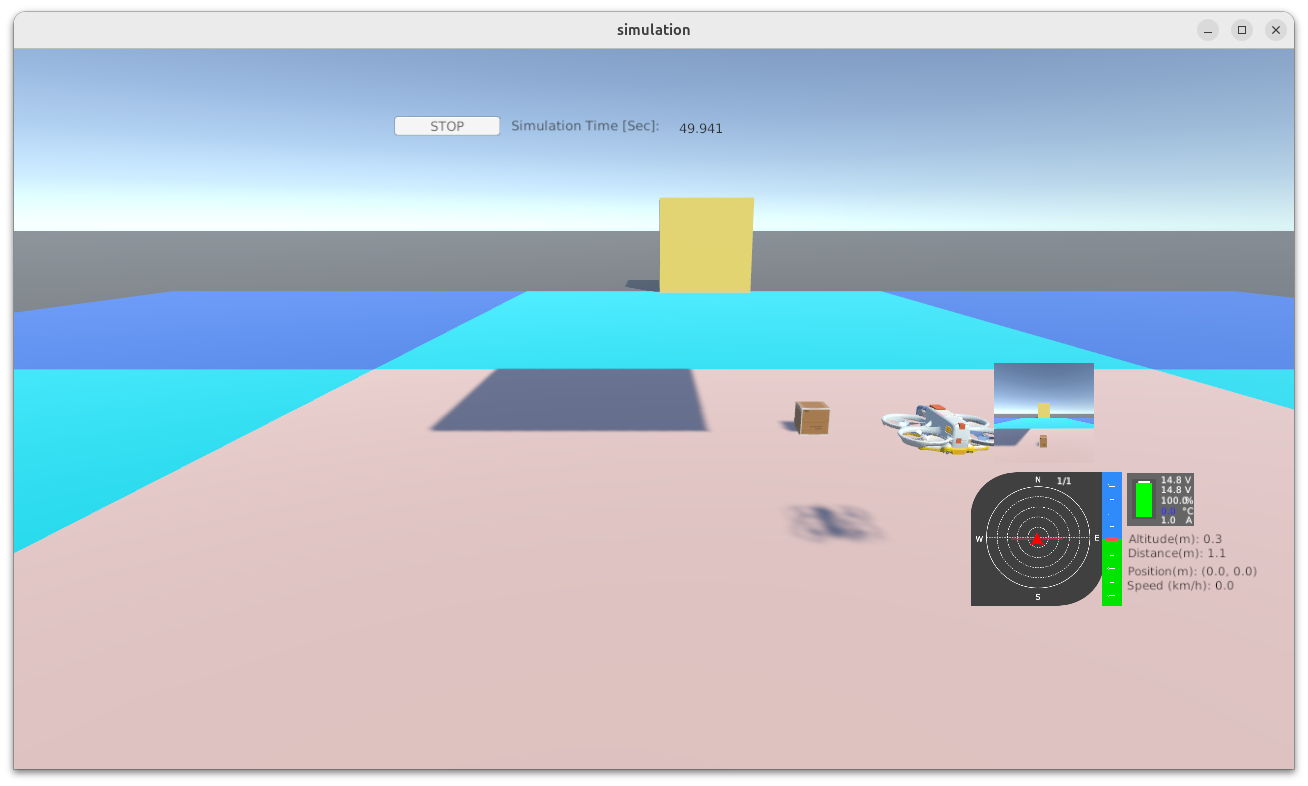
起動すると以下のようなシェル画面になります。
ビジュアライズ画面が別の画面で起動されます。

ビジュアライズ画面が起動されたらSTARTボタンをクリックします。STARTボタンをクリックすると、PX4のシェル画面のERRORがなくなれば箱庭ドローンシミュレータと連動できています。
3.2.4. PX4操作用のスクリプト起動¶
PS4、HoriPro miniなどゲームコントローラを接続して、PX4の操作ができるスクリプトを起動します。
$ cd ~/hakoniwa/drone_api-px4
$ python px4_rc_controller.py rc/rc_config/hori4mini-control-lnx-px4.json --connection udp:127.0.0.1:14540
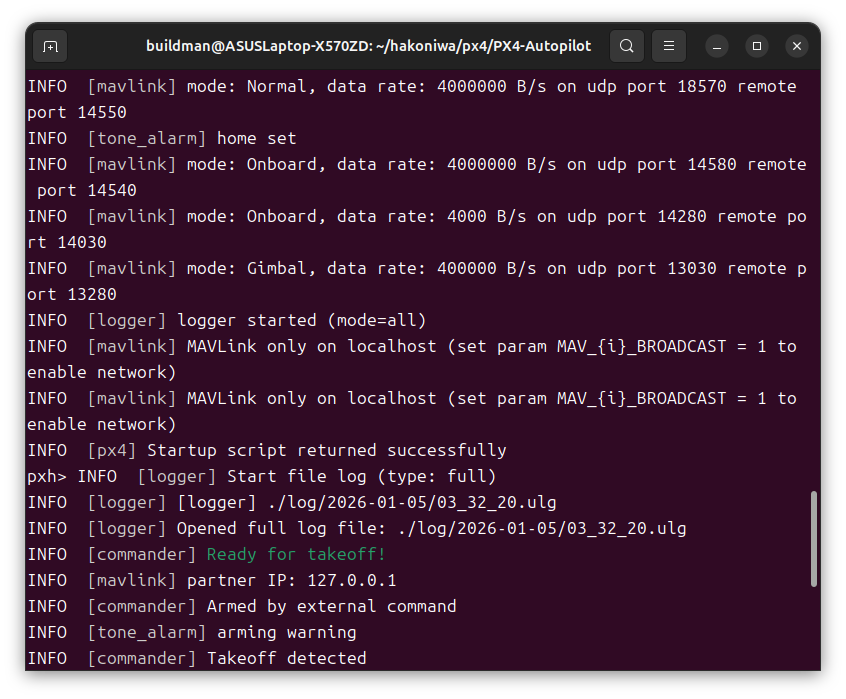
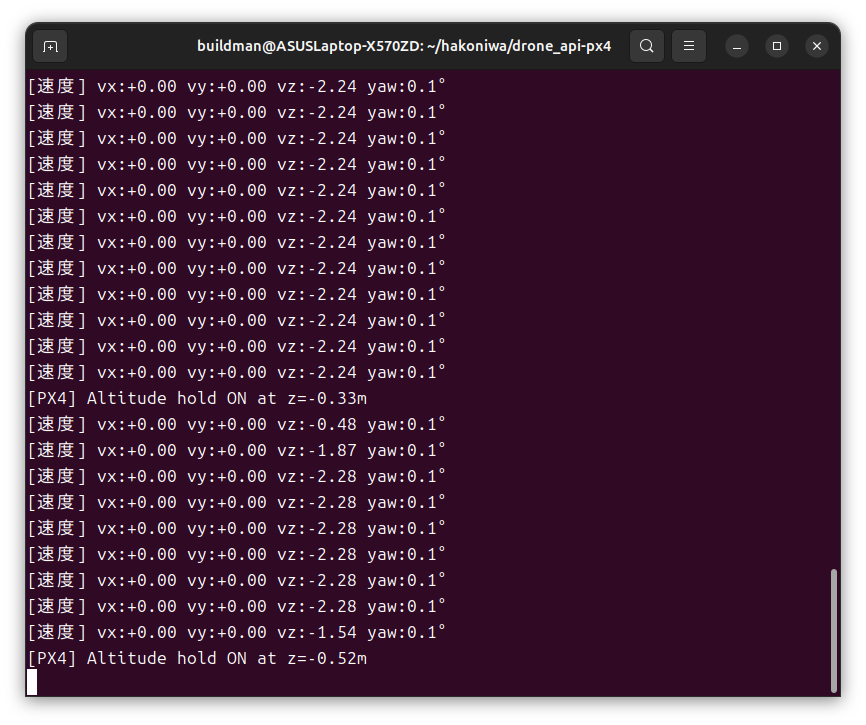
PX4と連動できると以下のシェル画面になります。
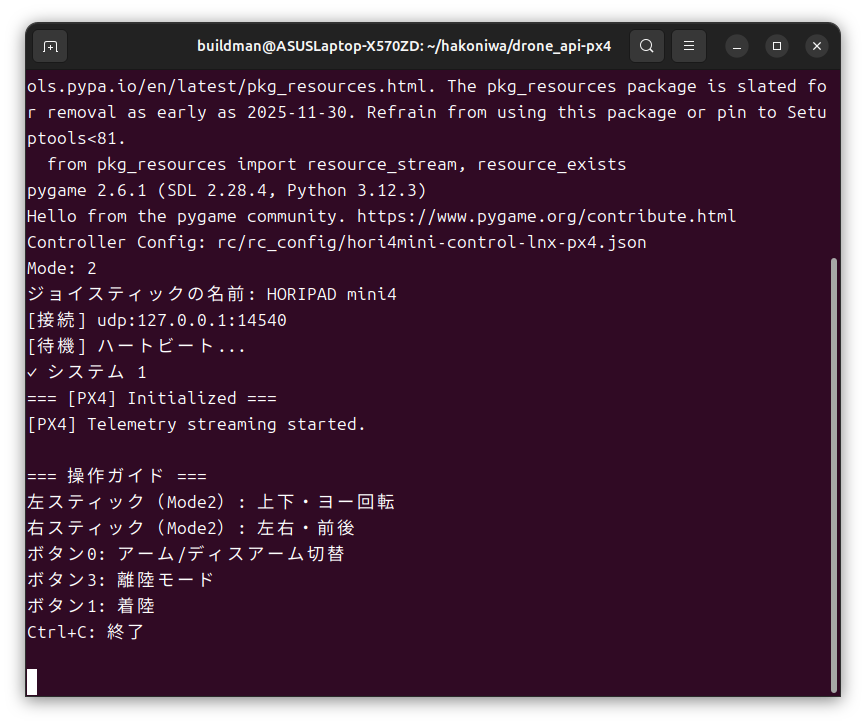
PX4と操作スクリプトは、UDP通信しています。PX4と連動できるとPX4のシェル画面にReady for takeoff!のように表示されます。
ゲームコントローラで操作できる内容は以下のようになっています。

3.2.4.1. ドローンの操縦¶
まずは、ARMさせますので、✖ボタンをクリックします。
PX4と通信がうまくできると、以下のような画面になります。
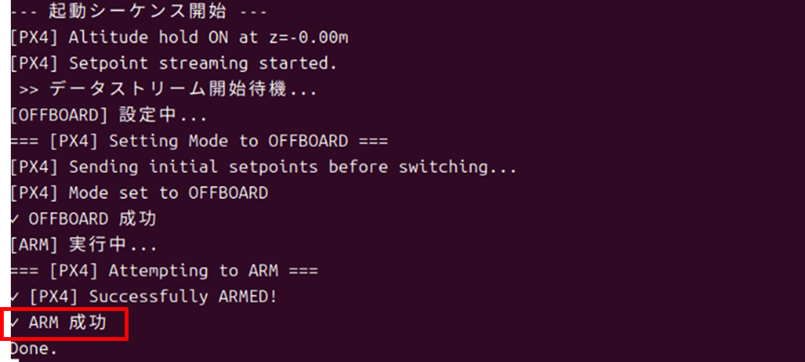
ARMが成功したら、左スティックにて上にスロットルを入れます。 スロットルを入れることで、ドローンが上に浮上します。
あとは、左右のスティックで操縦ができます。PX4操作用のシェル画面に左右のスティックでの操縦内容が表示されます。
着陸時には、〇ボタンをクリックすると着陸が実行されます。
4. 留意事項¶
動作確認にあたっての留意点となります。
4.1. 動作確認の手順について¶
箱庭ドローンシミュレータ起動→箱庭ドローンシミュレータビジュアライズ環境の起動までは、時間制約があります。箱庭ドローンシミュレータビジュアライズ環境の起動が遅くなった場合には、STARTボタンを押しても、シミュレーションが開始されない場合がありますので、STARTボタン押してもシミュレーションが開始されないようでしたら、再度、PX4の手順からやり直してください。
4.2. 動作確認の環境について¶
PX4を用いた箱庭ドローンシミュレータ動作確認は、一度終了させると再度、各種起動が必要になります。動作確認手順を最初から行ってください。
4.3. PX4操作用のスクリプトについて¶
PX4とUDP通信するスクリプトとなっています。スクリプトの動作については、PX4側との状態があってないと動作しない場合があります。 PX4操作用のサンプルとして作成していますので、間違っている点などがある可能性はあります。
5. LiDARの可視化¶
箱庭ドローンシミュレータには、さまざまなセンサが実装されています。障害物検知などをするためのLiDARセンサの動作確認環境も提供しています。
5.1. 動作方法¶
箱庭ドローンシミュレータビジュアライズ環境の起動手順の時にLiDARセンサの可視化できる環境を起動するようにしてください。
5.1.1. ドローンビジュアライズ+LiDARの可視化環境の起動¶
ビジュアライズ環境を起動します。
$ ~/hakoniwa/hakoniwa-drone-core/LiDARAvatar
$ ./simulation.x86_64
起動すると以下のようなシェル画面になります。ビジュアライズ画面が起動されたらSTARTボタンをクリックしてください。
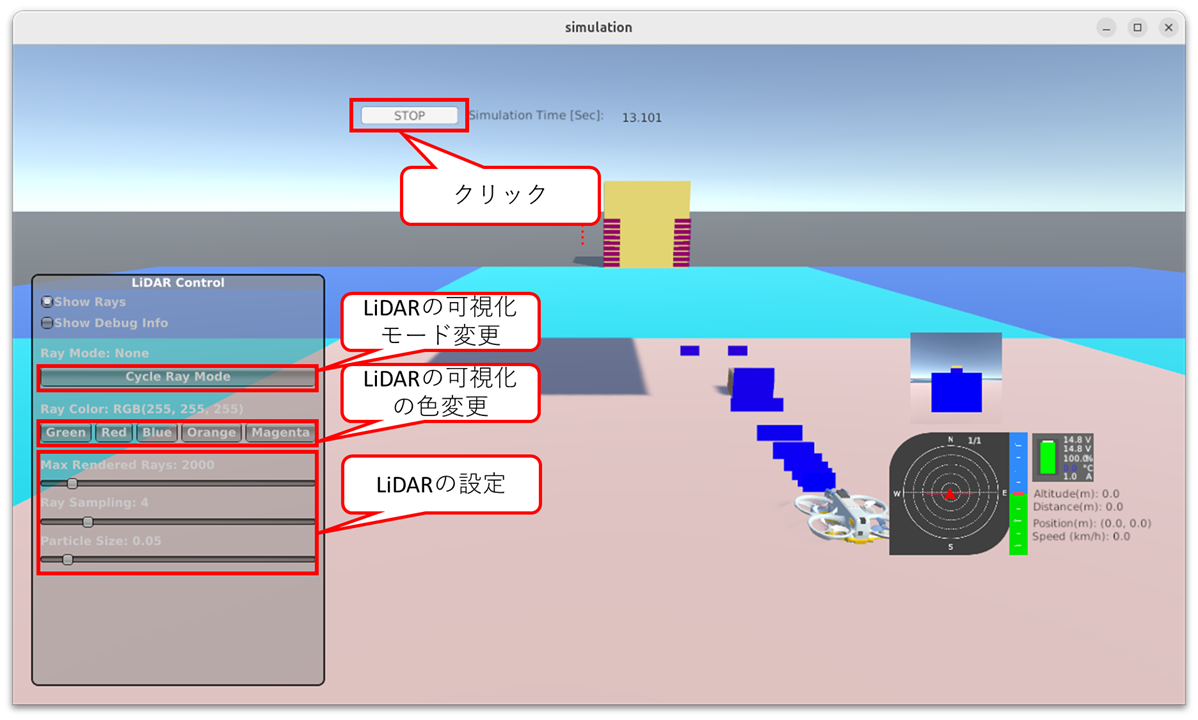
STARTボタンをクリックすると、PX4のシェル画面のERRORがなくなれば箱庭ドローンシミュレータと連動できています。
STARTボタンクリック後に、左下にあるLiDARセンサ用の設定をさまざま変更できるので、用途に合わせて使ってください。
5.1.2. LiDARセンサの可視化スクリプト¶
ドローンビジュアライズ+LiDARの可視化環境を用いなくても可視化できるスクリプトも準備しています。用途に合わせて可視化モードを利用してください。
5.1.2.1. Pytho モジュールの導入¶
以下のものをpipコマンドでインストールしてください。
pip install PyOpenGL PyOpenGL_accelerate
pip install pyqtgraph
pip install pyqt5
pip install open3d
5.1.2.2. スクリプトの実行¶
$ cd ~/hakoniwa/lidar_visual
$ python lidar_visualizer4.py cpp_core_config.json --mode pyqt5
起動すると以下のシェル画面になります。
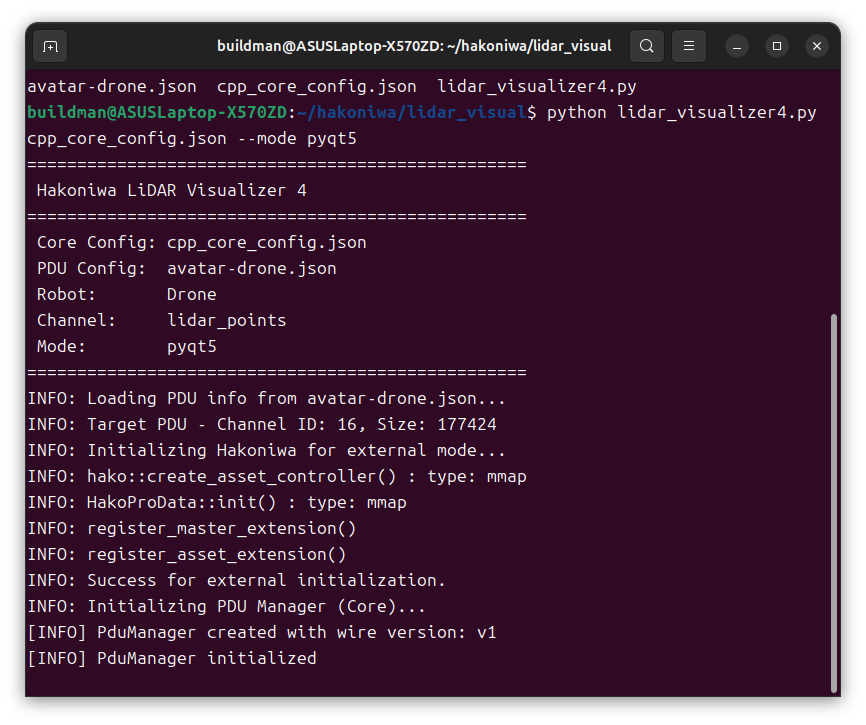
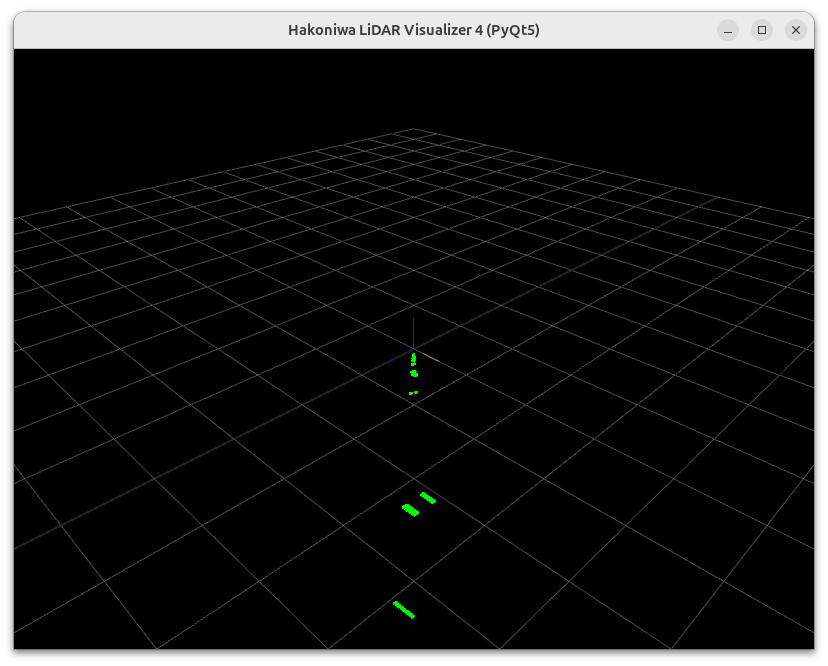
Qt5を用いてビジュアライズ画面が表示されます。
‐ lidar_visualizer4.py利用オプション
python lidar_visualizer4.py
usage: lidar_visualizer4.py [-h] [--pdu_config_path PDU_CONFIG_PATH]
[--robot_name ROBOT_NAME]
[--pdu_channel PDU_CHANNEL]
[--mode {open3d,matplotlib,pyqt5}]
[--delta_msec DELTA_MSEC]
core_config_path
用途に合わせて使い分けてください。